
Skip the Tuition, Not the Education
How to Train as a Mechatronics-Focused Mechanical Engineer for Under $5,000—While Working Full-Time

Skip the Tuition, Not the Education
How to Train as a Mechatronics-Focused Mechanical Engineer
for Under $5,000—While Working Full-Time
A Four-Year Self-Directed Curriculum Built from University Benchmarks
The Case for Self-Directed Engineering Education
A four-year mechanical engineering degree at an in-state public university now averages between $100,000 and $160,000 in total cost of attendance. Out-of-state and private institutions push that figure past $250,000. Equally significant is the opportunity cost: four years of foregone wages from full-time employment that, at even a modest entry-level associate position, represents another $120,000 to $160,000 in lost income. The combined economic burden—direct tuition plus lost wages—exceeds a quarter-million dollars for most students before they earn their first engineering paycheck.
The question is no longer whether alternatives exist. The question is whether those alternatives can deliver genuine competence. The answer, increasingly, is yes—provided the self-directed learner follows a structured curriculum, invests in low-cost hands-on laboratory tools, and builds a portfolio that demonstrates measurable capability. The convergence of three developments makes this possible: (a) the proliferation of university-quality open courseware from MIT, Stanford, Georgia Tech, and others; (b) the dramatic cost reduction in microcontroller platforms, sensors, and rapid-prototyping hardware; and (c) the emergence of professional-grade open-source engineering software that rivals commercial packages costing thousands of dollars per license.
This article presents a complete four-year self-directed curriculum modeled on the mechanical engineering programs at Ohio State University, Cal Poly San Luis Obispo, and the University of Florida—three institutions recognized for their respective strengths in research rigor, hands-on pedagogy, and mechatronics integration. The plan is designed for a learner working a full-time entry-level associate position, studying approximately 20 hours per week, and spending less than $5,000 on all equipment, materials, and resources over the full four years.
The Benchmark: What Universities Actually Teach
Before designing a self-directed path, it is essential to understand what the target institutions require. A comparison of OSU, Cal Poly SLO, and UF reveals a common core that transcends institutional branding. All three programs demand the same foundational mathematics sequence (Calculus I through III, Differential Equations, Linear Algebra), the same physics sequence (classical mechanics plus electromagnetism), and the same core mechanical engineering subjects: Statics, Dynamics, Mechanics of Materials, Thermodynamics, Fluid Mechanics, Heat Transfer, Machine Design, and Control Systems. The differences emerge in emphasis and elective structure, not in fundamental content.
Ohio State University
OSU’s BSME program emphasizes research-oriented depth. Its mechatronics pathway includes elective coursework in robotics, embedded systems, and a dedicated Mechatronics Laboratory. The program requires C/C++ or Python programming from the first year and integrates systems-level thinking through its Systems Dynamics sequence. OSU’s strength lies in its analytical rigor—students develop strong theoretical foundations before touching hardware.
Cal Poly San Luis Obispo
Cal Poly’s “Learn by Doing” philosophy inverts the typical sequence. Students engage with physical prototyping and laboratory work from the outset, building intuition before formal theory. The mechatronics focus includes PLCs, microcontrollers, and automation alongside standard ME coursework. Senior projects at Cal Poly are notably ambitious, often involving industry-sponsored builds. This approach produces graduates who can fabricate, assemble, and troubleshoot on day one—a quality that self-directed learners should prioritize.
University of Florida
UF offers a formal Mechatronics Minor alongside its BSME, which provides the most structured integration of mechanical engineering with embedded control and smart systems. The minor adds courses in robotics, smart systems, and embedded control to the standard ME core. UF’s approach is valuable as a curriculum template because it explicitly defines the boundary between core ME and mechatronics specialization.
The Free and Low-Cost Resource Ecosystem
The infrastructure supporting self-directed engineering education has matured far beyond what most people realize. What was once a scattered collection of lecture recordings has evolved into a comprehensive ecosystem of structured courses, interactive simulations, professional-grade software, and community support networks. Understanding this ecosystem is the first step toward building a credible alternative to traditional enrollment.
Open Courseware and Structured Learning Platforms
MIT OpenCourseWare remains the gold standard, offering complete course materials—lectures, problem sets, exams with solutions—for virtually every subject in the proposed curriculum. The 18.01 through 18.06 sequence covers Calculus through Linear Algebra with the same rigor expected at any top-tier institution. The 2.00x series covers the mechanical engineering core. Beyond MIT, Khan Academy provides scaffolded instruction for mathematics and physics that serves as either primary instruction or review. Coursera and edX host university-partnered courses from Georgia Tech, the University of Michigan, and the University of Pennsylvania that include graded assignments and optional certificates. For control systems specifically, Brian Douglas’s YouTube channel and the complementary MATLAB Onramp (free from MathWorks) together constitute one of the most effective learning pathways available anywhere, including inside university classrooms.
Professional-Grade Open-Source Software
The software landscape has shifted decisively in favor of the independent learner. FreeCAD provides parametric 3D modeling with finite element analysis capability built in. Onshape offers browser-based CAD with full parametric modeling at no cost for public projects. OpenFOAM delivers computational fluid dynamics capability that competes with commercial packages costing $20,000 or more per seat. SimScale provides cloud-based FEA and CFD with a free tier sufficient for educational use. GNU Octave replicates most MATLAB functionality, while Python with NumPy, SciPy, and Matplotlib handles everything from signal processing to numerical methods. The Arduino IDE and PlatformIO cover embedded systems development. ROS (Robot Operating System) provides the same robotics middleware framework used in industry and academic research labs worldwide.
Low-Cost Hardware Platforms
The hardware revolution is equally significant. An Arduino Uno costs under $25 and teaches the same microcontroller programming principles as a $3,000 university lab station. A Raspberry Pi at $35–75 provides a complete Linux computer capable of running ROS, processing sensor data, and controlling actuators. Entry-level 3D printers now cost $200–$300 and produce parts adequate for prototyping mechanical assemblies, robotic linkages, and test fixtures. Used oscilloscopes appear on secondary markets for $100–$300. Breadboards, jumper wires, resistors, capacitors, and basic sensors cost pennies per unit. A complete electronics workstation that would have cost $5,000 a decade ago can now be assembled for under $500.
The Four-Year Self-Directed Curriculum
The following curriculum synthesizes the strongest elements of all three benchmark programs into a structured sequence designed for 20 hours per week of study alongside full-time employment. Each semester assumes approximately 16 weeks. The curriculum is organized by year and semester, with specific resources, lab activities, and deliverables for each course. (See the full $5000 Four-Year Self-Directed Curriculum pdf file at the bottom of this article.)
Year 1: Foundations (Mathematics, Physics, and Programming)
Semester 1. The first semester establishes the mathematical and computational foundation upon which everything else rests. Calculus I (Differential Calculus) and Physics I (Classical Mechanics) run in parallel, which is the same sequencing used at all three benchmark institutions. The learner works through MIT OCW 18.01 for calculus and MIT 8.01 or Khan Academy physics for mechanics, completing assigned problem sets on a weekly schedule. Programming begins simultaneously using Python through Automate the Boring Stuff (free online) and MIT’s 6.0001 Introduction to Computer Science. The learner purchases a Raspberry Pi kit ($75–$150) and begins writing small programs that interact with physical sensors—reading temperature, measuring distance with ultrasonic sensors, blinking LEDs in response to input. These exercises are trivial in isolation but establish the habit of connecting code to the physical world, which is the defining characteristic of mechatronics. CAD introduction begins with FreeCAD or Onshape, modeling simple geometric parts and assemblies. The semester’s deliverable is a documented Python project that reads sensor data and produces a formatted output—a weather station, a light-level logger, or a simple alarm system.
Semester 2. Calculus II (Integral Calculus) continues through MIT OCW 18.02, while Physics II (Electromagnetism) introduces the electrical principles that underpin circuit analysis and motor control. Programming advances to MATLAB (or GNU Octave) for engineering computation—plotting functions, solving systems of equations, and basic numerical methods. The learner purchases an Arduino Uno starter kit ($50–$100) and begins building simple circuits: voltage dividers, LED arrays, transistor switches, and basic motor drivers. The critical lab exercise for this semester is building and tuning a line-following robot using the Arduino, two infrared sensors, and two DC motors. This single project integrates programming, circuit design, sensor interfacing, and mechanical assembly—and it costs under $30 in parts. Technical communication practice begins with weekly written summaries of what was learned, formatted as engineering memos. The semester’s deliverable is the line-following robot, documented with a design report that includes circuit schematics, code listings, and performance data.
Year 2: Core Engineering Fundamentals
Semester 3. The second year shifts from pure mathematics and physics into engineering analysis. Calculus III (Multivariable Calculus) and Differential Equations run concurrently, using MIT OCW 18.02 and 18.03. Statics begins through Jeff Hanson’s YouTube lectures or the free Engineering Statics course on Coursera. The learner builds physical beam-loading experiments using 3D-printed fixtures, a bathroom scale (as a force gauge), and aluminum bar stock from a hardware store. Circuits and Electronics begins formally through MIT 6.002 on edX, supplemented by hands-on work with the Arduino and a used oscilloscope ($100–$300 on eBay). The oscilloscope is one of the most important purchases in the entire budget—it transforms abstract waveform concepts into visible, measurable phenomena. Thermodynamics I begins through MIT 2.005 or the equivalent Coursera offering. The semester’s deliverable is a documented circuits project: an Arduino-controlled temperature monitoring system with data logging and display.
Semester 4. Dynamics follows Statics using the same lecture resources. Linear Algebra (MIT 18.06, taught by Gilbert Strang) provides the matrix mathematics essential for robotics kinematics and control theory. Mechanics of Materials begins through a combination of lecture content and physical testing: the learner 3D-prints tensile test specimens in PLA and PETG, loads them to failure using a simple lever-and-weight arrangement, and compares measured yield behavior to published material data. This exercise is crude compared to a university tensile testing machine, but it builds intuition for stress-strain relationships that no simulation can replicate. Basic CAD proficiency deepens through modeling assignments that replicate components from Shigley’s Mechanical Engineering Design. The semester’s deliverable is a structural analysis report on a simple truss or bracket, comparing hand calculations, FreeCAD FEA results, and physical test data from a 3D-printed prototype.
Year 3: Advanced Mechanical Engineering and Mechatronics Core
Semester 5. Fluid Mechanics begins through MIT 2.006 lectures, supplemented by OpenFOAM computational exercises. The learner cannot build a wind tunnel at home, but can simulate flow around basic geometries and validate results against published data—an exercise that develops both physical intuition and computational competence. Heat Transfer follows through the same MIT pathway. Machine Design begins in earnest using Shigley’s textbook, which remains the standard reference across all three benchmark programs. The learner designs, analyzes, and 3D-prints a working gear train or cam mechanism. Control Systems—the keystone of mechatronics—begins through Brian Douglas’s video series and the University of Michigan’s Coursera specialization. The critical lab exercise is implementing PID control on an Arduino-driven DC motor, tuning the controller to achieve specified step-response characteristics. This single exercise—cost under $20 in parts—teaches more about control theory than many semester-long university courses. The semester’s deliverable is a PID-controlled positioning system with documented tuning methodology and performance data.
Semester 6. This semester marks the full transition into mechatronics specialization. Embedded Systems deepens through Raspberry Pi projects using C/C++ and real-time operating system concepts. Robotics Kinematics begins through the University of Pennsylvania’s Coursera Robotics Specialization, which covers forward and inverse kinematics, trajectory planning, and motion control. The learner builds a 3- or 4-DOF robotic arm using 3D-printed links, hobby servos, and Arduino or Raspberry Pi control ($200–$400 total). Sensors and Actuators study formalizes what the learner has been practicing informally: understanding datasheets, selecting appropriate sensors for given applications, interfacing with various communication protocols (I2C, SPI, UART), and driving different actuator types (servo, stepper, DC, brushless). The semester’s deliverable is the functional robotic arm with inverse kinematics control, documented with kinematic diagrams, control architecture, and demonstration video.
Year 4: Specialization and Capstone Integration
Semester 7. Vibrations and Acoustics proceeds through MIT 2.003 lectures and MATLAB simulations. Finite Element Analysis deepens through FreeCAD’s built-in FEA workbench or SimScale’s cloud platform, analyzing increasingly complex geometries and loading conditions. PLCs and Industrial Automation represents the bridge to industry employment: the learner purchases a used PLC trainer from eBay ($300–$500) and works through ladder logic programming, which remains the dominant language in manufacturing automation. This investment directly supports employability in robotics and automation roles. Elective study begins in one of three tracks: (a) AI for Mechanical Systems, using Python-based machine learning applied to sensor data classification and predictive maintenance; (b) Autonomous Vehicles, using ROS-based navigation and SLAM (Simultaneous Localization and Mapping) on the Raspberry Pi; or (c) Biomechanics, studying human movement analysis through sensor-based motion capture. The semester’s deliverable is a PLC-controlled automated sorting or assembly station.
Semester 8. The final semester is dedicated to a capstone project that integrates every discipline studied over the preceding three and a half years. The recommended project is an autonomous mobile robot: a wheeled platform with motor control (Dynamics, Controls), environmental sensing (Sensors, Embedded Systems), path planning (Robotics, Programming), structural integrity (Machine Design, Mechanics of Materials), and industrial communication protocols (PLCs, Automation). The budget allocation for the capstone is $800–$1,000, which is sufficient for a Raspberry Pi 4, Arduino Mega, motor drivers, LIDAR or depth camera, chassis materials, and power system. The capstone deliverable includes complete mechanical drawings, electrical schematics, control architecture documentation, source code repository (GitHub), a demonstration video, and a written design report formatted to professional standards. This portfolio package becomes the learner’s primary credential when seeking engineering employment.
Complete Budget Breakdown
The following table details the full four-year equipment and resource budget. Every item listed serves multiple courses across the curriculum, which is how the total remains under $5,000.

The 20-Hour Weekly Study Plan
Consistency matters more than intensity. The following weekly structure distributes 20 hours across five study days while preserving weekday evenings and one full weekend day for rest. This schedule assumes the learner works a standard weekday job.
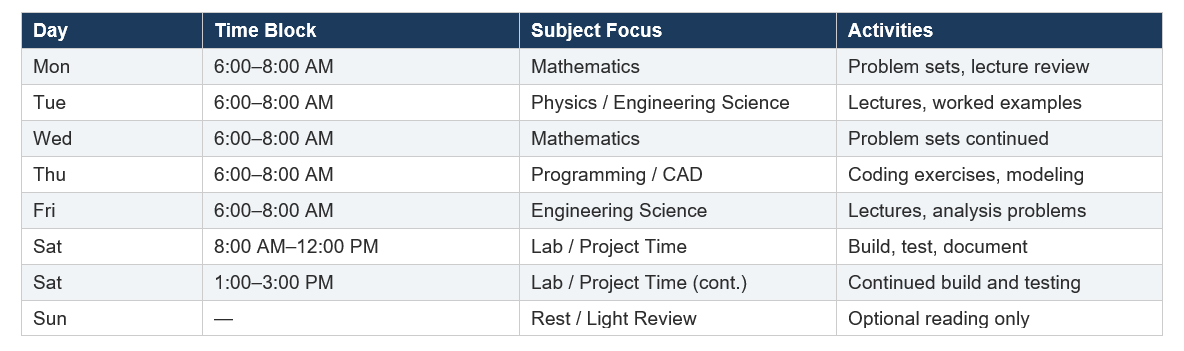
The Saturday block is the most important session of the week. It provides the contiguous time needed for laboratory work: soldering circuits, assembling mechanisms, running experiments, debugging code, and documenting results. Projects cannot advance in 30-minute increments. The six-hour Saturday block replicates the university lab session and is non-negotiable for genuine competence development.
What You Cannot Replicate—and What to Do About It
Intellectual honesty demands acknowledgment that approximately 30% of a traditional mechanical engineering education cannot be fully replicated at home. Fluid mechanics experimentation requires wind tunnels and flow visualization equipment. Advanced manufacturing instruction requires CNC mills, lathes, EDM machines, and welding stations. Materials testing at scale requires universal testing machines, hardness testers, and metallographic preparation equipment. Vibrations analysis at professional fidelity requires precision accelerometers and signal analyzers.
The mitigations are real but imperfect. Computational fluid dynamics through OpenFOAM provides simulation experience that is genuinely valuable and increasingly used in industry, but it does not replace the physical intuition developed by watching flow separation over an airfoil in a smoke tunnel. Community college partnerships or makerspace memberships ($200–$500 annually) provide access to CNC equipment and larger machine tools. Some community colleges allow non-enrolled individuals to use lab facilities for a fee. Professional certifications from organizations like the American Society of Mechanical Engineers or the Society of Manufacturing Engineers can partially offset the absence of a degree credential.
The most significant gap, however, is not equipment. It is peer interaction, instructor feedback, and structured assessment. The self-directed learner must actively compensate by participating in online engineering communities (Reddit’s r/engineering, Discord servers, Stack Exchange), joining local maker and robotics groups, entering competitions (RoboSub, Formula SAE if affiliated with a club team, FIRST Robotics as a mentor), and seeking mentorship from practicing engineers. The portfolio of documented projects, published on GitHub and demonstrated through video, serves as the primary credential in the absence of a diploma.
The Portfolio as Credential
A completed degree signals to employers that a candidate endured a structured program and passed a series of assessments. A portfolio of documented engineering projects signals something different and arguably more powerful: that a candidate identified problems, designed solutions, built physical systems, tested them, iterated, and documented the entire process without institutional scaffolding. The self-directed learner’s portfolio should include, at minimum, the following components after four years.
A GitHub repository containing all source code—from early Python scripts through ROS packages and PLC ladder logic—organized by project with clear README files explaining objectives, methods, and results. A technical blog or website documenting major projects with photographs, schematics, performance data, and reflections on design decisions and failure modes. Video demonstrations of working systems, particularly the robotic arm and autonomous mobile robot capstone, uploaded to YouTube or a personal portfolio site. A collection of engineering analysis reports—hand calculations validated against simulation—covering structural, thermal, and dynamic problems. Optional but valuable: Coursera or edX certificates in Control Systems, Robotics, and Embedded Systems, which provide third-party validation of coursework completion. Letters of reference from competition organizers, makerspace supervisors, or professional engineers who have reviewed the work.
This portfolio package, assembled over four years of disciplined work, speaks directly to the capabilities that hiring managers in robotics and automation actually evaluate. It demonstrates not just knowledge but initiative, self-direction, and the ability to deliver functional systems—qualities that distinguish the best engineers regardless of their educational pathway.
The Honest Comparison: $5,000 vs. $200,000
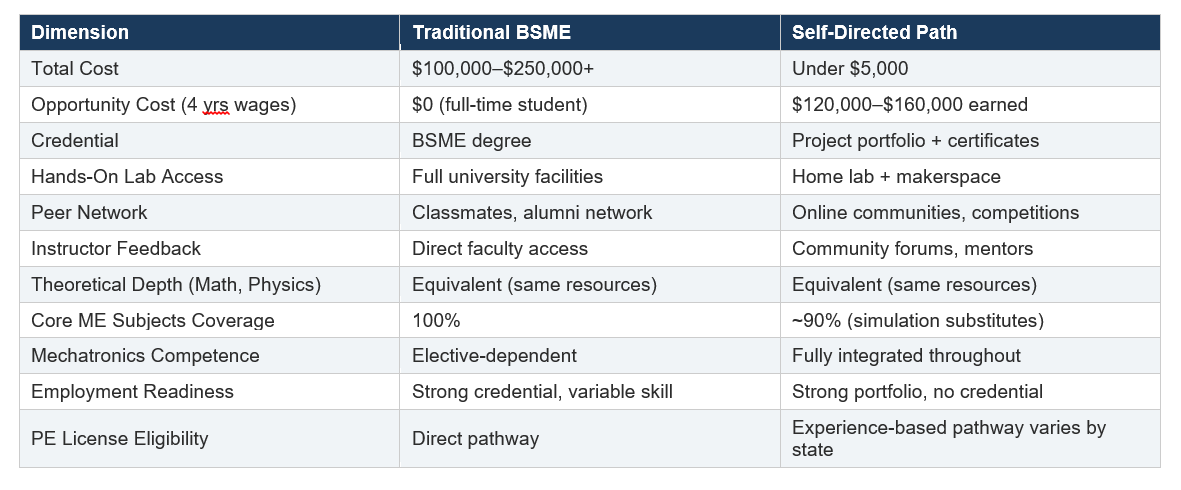
The comparison is not entirely favorable to the self-directed path, nor should it be presented as such. The traditional degree provides a recognized credential, direct access to research facilities, structured peer learning, and a clear pathway to Professional Engineer licensure. What the self-directed path provides is financial freedom, immediate employment, hands-on competence that is often superior to traditionally educated graduates who took minimal lab electives, and a portfolio that demonstrates initiative and capability in tangible form. The right choice depends on the individual’s circumstances, career goals, and capacity for self-discipline.
Conclusion: The Path Is Real
The tools exist. The content exists. The hardware is affordable. The software is free. The only missing ingredient is the sustained discipline to follow through on a four-year self-directed program while holding down a job and building a life. That discipline cannot be purchased at any price—not from a university, not from a MOOC provider, and not from a book. It comes from the learner alone.
What has changed in the last decade is that discipline, when applied consistently, can now produce genuine engineering competence outside the traditional institutional framework. A person who completes this curriculum—who builds the circuits, writes the code, prints the parts, tunes the controllers, assembles the robots, and documents everything with professional rigor—will possess skills that many degreed engineers lack. The $5,000 investment buys not just equipment but proof of capability. The projects speak. The portfolio demonstrates. The work, done properly, is its own credential.
The path is unconventional. It is not easy. But it is real, it is accessible, and for the right person—someone with determination, curiosity, and the willingness to do hard work without external validation—it represents one of the most compelling educational opportunities available today.
What do the Wright Brothers, Thomas Edison, Henry Ford, and Michael Faraday have in common? None held an engineering degree. The Wrights never finished high school. Edison was expelled at twelve. Ford apprenticed in a machine shop. Faraday was a bookbinder who taught himself electricity from the books he was binding. Every one of them learned by building, testing, failing, and building again — which is exactly what this curriculum asks you to do.
Facing the cost of education today, this is how I would approach it: follow a structured university curriculum using free resources, invest in low-cost tools that let me build real systems, work an entry-level associate position that pays the bills and builds discipline, and let four years of documented projects speak louder than a diploma. The path is unconventional. The engineering is not.
Am I on the right track? Am I missing something?
Herbert Roberts, P.E., is a licensed professional engineer with 32 years in aviation research and development, 62 U.S. patents, and 8+ years of forensic engineering consulting. He writes at Inventor’s Mind on systematic innovation, engineering judgment, and the structures that make technical organizations succeed or fail.
© 2026 Inventor’s Mind Press | inventorsmindpress.com